何でもつかめるロボットハンド
経済産業省傘下のNEDO(新エネルギー・産業技術総合開発機構)と都立産業技術高等専門学校、ダブル技研は、人間の手を模倣したロボットハンド(図1)を共同開発、イチゴやシュークリームのような柔らかい物からペンのように硬い物までつかむことを示した。メカニクスを工夫して指1本あたり1個のモータで指の関節を全て動かす。
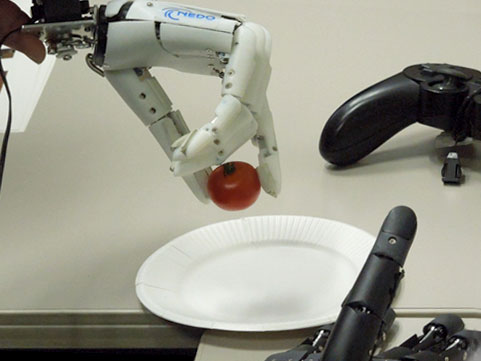
図1 柔らかいミニトマトをつかむロボットハンド モータ回路部分は手で持っている
これまで、産業用のロボットハンドは、モノをつかみ、別の場所に置くという動作を主体として使われてきたが、つかむべきものに応じて、ハンドの部分を取り換えてきた。指などでつかむロボットハンドもあったが、大抵は半導体のウェーハをつかむように真空チャックが多かった。つかむべき対象物はほとんどが固いもので、空のペットボトルや柔らかいシュークリームなどはうまくつかめなかった。しかも産業用の多指ロボットハンドは、高価で従来170万円以上もした、とロボットハンドメーカーのダブル技研代表取締役の和田博氏は言う。
今回開発されたロボットハンドは、からくり人形のようにメカニクス中心で指を第1関節から第3関節まで連動させて動かす。人間の手は、物をつかむときは関節一つだけで動かすことはしない。必ず3つの関節を折り曲げながらつかんでいく。関節ごとにモータを取り付ける必要はなく、指1本あたり1個のモータですむ。このため、和田氏は量産前でも従来の半額以下のロボットハンドを目指し普及を狙っている。
さらに5本の指でモノをつかむときには、各指同士も連動しており、人間の指と同様、ロボットの指1本だけが折り曲げずまっすぐに伸びたままということはない。各指が互いに連動しながら徐々に曲がり物をつかんでいく。開発した都立産業技術高専の深谷直樹准教授は、人間の指を細かく観察しながら、人間の手に近い高性能と堅牢性を併せ持つロボットハンドを目指してきた、と述べている。一つの手には5個のモータを内蔵、物をつかむ動作としてはこれだけで表現できるとする。
指で物をつかむという行為は、つかんだ物がすぐに落ちては意味がないため、つかむという機構についてもダブル技研が調べており、指先には「なじみ機構」が存在するという。これはモノをつかむ時、まず指先の1点でつかみ、徐々に指の点から面へと広げていく機構のこと。この時に物が重力などで引っ張られても指先にはそれに対する抗力が働き、物との摩擦によりしっかり握ることができる。ダブル技研は、都立高専の開発したロボットハンドを元にさらに指先のなじみ機構を加えることにより、例えば詰め替え用洗剤の上面の薄い部分を持ち運ぶこともできるというビデオを見せた。
ただし、つかむ対象物は機械学習などで予め学習させておく必要がある。指先の角度とサーボモータが止まる角度をデータベースに蓄積しており、対象物と参照させながら角度を設定する。記者会見のデモ(図2)では、イチゴやリンゴ、油性インクペン、シュークリームなど形状や固さがさまざまに違うものを持たせてみた。イチゴは小さすぎるため(指が大きすぎたため)、なかなかうまくつかめなかったが、最終的にはつかむことができた。これは、カメラで画像を撮ると共に物体の3次元的な深さ方向の距離を測定する。物体を予め機械学習した結果を保存しているデータベースと比較して物体を見分ける。物体の種類に応じて、指が設定角度で止まることで柔らかい物もつかめるようになっている。この設定角度は、物体ごとの指先に応じたモータの角度を予め設定しておく。

図2 ダブル技研の3本指ロボットハンドはリンゴをはじめ、オレンジやシュークリーム、細長い油性ペン、イチゴをつかむデモを見せた
このロボットハンドは、NEDOが2015年度から進めている「次世代人工知能・ロボット中核技術開発」というプロジェクトの中の一つの研究成果であり、都立高専とダブル技研が2016年度からのロボット研究として始めた。開発したロボットハンド技術への補助金額は明らかではないが、この「次世代人工知能・ロボット中核技術開発」プロジェクトの2017年度の総額は45億円、2018年度はまだ確定してないが予算案として、56.9億円を申請する。このプロジェクトは2019年度まで続く。それ以降は、実用化に向ける計画である。
参考資料
1. 単純制御でさまざまな物をつかむロボットハンドの「からくり」を開発 (2018/01/11)