ニューロチップ概説 〜いよいよ半導体の出番(1-2)
第1章「ニューロチップを取り巻く概況〜いよいよ半導体の出番(1-1)」では、これまでのアルゴリズムの進化や半導体チップが登場する背景について紹介したが、後半ではニューロチップの技術の流れについて紹介する。この寄稿は、元東芝の半導体エンジニアであり、元半導体理工学研究センター(STARC)にも在籍していた百瀬啓氏がニューロチップの現状を語っている。(セミコンポータル編集室)
著者: 元半導体理工学研究センター(STARC)/元東芝 百瀬 啓
第1章:ニューロチップを取り巻く概況 〜いよいよ半導体の出番
1.1 アルゴリズム進化/システム応用の広がりは指数関数的
1.2 満を持して半導体登場
1.3 エッジ系でのビジネス展開が加速 〜車、ドローン、ロボット 自律系の取り込みも〜
1.4 低消費電力化
1.5 2つの流派があることを常に認識しておく必要がある
1.6 まだ2合目、3合目に到達した段階
1.3 エッジ系でのビジネス展開が加速〜車、ドローン、ロボット、自律系の取り込みも
エッジ系の当初(2012〜2015年)の動きも、2012年のAlexNetの成功を起爆剤として発展してきた。なお、AlexNetとは、画像認識の一つである一般物体認識にディープラーニングを適用し、際立った認識率改善を成し遂げたCNN(畳込みニューラルネットワーク)の中の一つの通称である。論文の筆頭著者のAlex Krizhevsky氏(現在米Google社、当時トロント大学でHinton教授のグループ)の名前が由来である。そこには、IP/FPGA展開をターゲットとしたもの、比較的軽い画像処理のもの、さらにはフラグチップ系のもの、と3種のテクノロジーがあった。それぞれCPUおよびGPGPUに対して、ニューラルネットワーク/ディープラーニングにより最適化された回路アーキテクチャの構築・実装を目指した。
IP/FPGA展開では、米TeraDeep社(FPGA)、米Synopsys/Cadence社(回路IP)、そしてデンソー(FPGA)などがCNNのIP/FPGA実装の研究開発をしていた。CNNはパターン認識、特に画像認識に多くの優れた特長を有し、ディープラーニングのど真ん中に位置するネットワークである。CNNをウェアラブルデバイスに適用して、比較的軽い32x32ピクセルクラスの画像処理をさせていたのが、中国科学院CAS、韓国KAISTなどである。
フラグチップとして、比較的ハイエンドの応用を掲げ研究していたのが、Qualcomm(Zeroth Project)、IBM(TrueNorth)、などである。Qualcommはスマホからロボット/車まで、IBMはエッジ系全般(広くは人間の脳)をターゲットとした。
こういった当初の動きを受けて、現在の2016年には、アルゴリズムが一定の完成を見たため、実チップを作り、応用やビジネスを展開しようとしている動きがある。さらにロボットやドローンなどの運動系機能を実装したチップも登場し始めている。
想定されるほとんどのエッジ系アプリで程度差はあるが、実ビジネスでの使用を意識したチップが発表されている。いくつかを紹介する。まずはハイエンド応用(高性能GPU)の分野である。
ハイエンド:クルマ/安心・自動運転用GPGPU(Drive-PX2:nVidia製Tesla M40をクルマ用に特化した製品)
2016年CESで発表があったように、本来サーバー用途のGPGPU(汎用のグラフィックスプロセッサ)がエッジ用、すなわち実行用に使用されようとしている。安心安全運転システム開発用(自動運転用と称している)に高性能のGPU(Teslaシリーズ)が投入されている。ディープラーニングによる高度の画像認識、さらには新しいアルゴリズムの実装の先駆けを目指している。現状は消費電力300Wで、まずは開発用/高級車(High End製品)対応との位置づけである。
ミッドレンジ(汎用コア):スマホ用Qualcomm社、ドローン用Movidius社などの製品
次に位置しているのが、Qualcomm社とMovidius社の動きである。従来の各社の培ってきた汎用のコア(CPU/GPU/DSP、ベクターVLIWプロセッサ)をIPとするチップを市場に投入している。消費電力は1W以下。QualcommはSnapdragon 820でスマホのマルウェア対策への展開と画像認識用への展開を目指し、SDKをリリース(2016年後半)して開発者と共同でアプリケーションも同時に創出して行こうというもくろみである。次機種830で本命の運動系アプリを狙うのだろうか。後者はドローンへの展開およびGoogleとの市場開拓・開発で連携を行っている。
用途に特化したASSP:車/安心、ドローン、ロボット、IoT、スマホ、スマートグラス向け
ASSPとしてはKAIST (最適化、機能化、低消費)のチップと、MIT-NVIDIA共同やIntelのチップがある。KAISTは応用特化型(ロボット、ADAS、HMD/AR、IoT)のASSPチップを準備、ビジネスへの展開は未知数ではあるが、注意を要する。特にRNN(Recurrent NN)とRL(Reinforcement Learning)を実装しているのは注目に値する。
MIT+NVIDIA(CNN)、Intel(k近傍法)は本格的な回路基礎最適化を検討している。前者は、CNNに特化し必要な柔軟性を持ちながら、極度に回路構成を最適化し、低消費電力性を実現している。なお、この最適化検討への半導体の本格参画が始まっており、注視する必要がある。
コアとなるアルゴリズム(CNN)をベースとし大きな踊り場(ビッグビジネスのポテンシャル)を目指して、満を持して半導体製品が登場する。通常なら成長期から成熟期に時間を掛けて進むが、汎用品でアプリケーション市場を立ち上げると同時に、よりASSP的なチップも同時に投入される気配もあり、成熟までの期間が短い可能性もある。さらに注目すべきは、既にクルマ、ロボット等の判断動作・予測の運動系が実装済み(学会発表レベル)である点だ。各チップの詳細に関しては次回以降報告する予定である。
1.4 低消費電力化
図3はエッジ応用を念頭に置いた際によく使用される性能指標(演算速度/消費電力)を図2のチップ(「ニューロチップ概説 〜いよいよ半導体の出番(1-1)」参照)に対してプロットした図である。入力の次元数、16/32bit、固定/浮動小数点、メモリ種類、混載、チップ間通信の有無、デザインルール世代差等々において不明な点があるため、全体の傾向として捉えてほしい。次回わかる範囲での詳細を報告する。国際半導体回路学会として最大のISSCC 2014でスタンフォード大学のHorowitz教授が講演されたデータ(参考資料13)を参考として図中に加えている。並列度を上げても、中間値処理/全結合処理時のデータ・パラ-メータへのアクセスが律速要件となる。外部メモリへのアクセス速度(内部メモリへのアクセス速度の数百倍(容量))が律速(減速)要因となる。さらにムーアの法則の限界もあり、Beyond Mooreとしてデバイスレベルで多くの取り組みも期待されている。ニューロモルフィックチップであるIBMのTrueNorthの値を参考として入れている。注釈4を参照いただきたい。
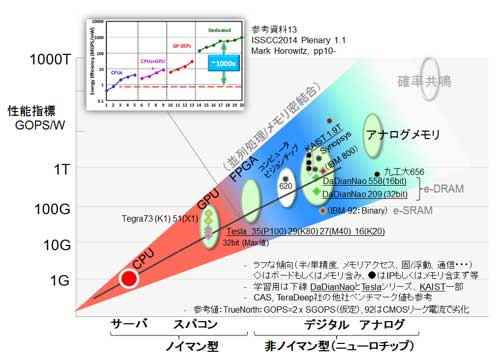
図3 ニューロチップの性能のトレンド(速度/消費電力) :IBM TrueNorthに関しては注釈4を参照
1.5 2つの流派があることを常に認識しておく必要がある
図4は人間の脳/人工知能に関して、素子レベル(半導体)からシステムレベル(人間の脳/人工知能)までの要素をハイアラキーとして表現した図である。2つの流派とは、ニューロモルフィック(生体様)工学の流派(「ニューロチップ概説 〜いよいよ半導体の出番(1-1)」の参考資料1)と、工学的に成功しているディープラーニング・ニューラルネットワーク(狭義)の流派である(赤字はその関連技術)。繰り返しになるが、前者は神経ネットワークモデルを集積回路上に再構築して、逆に脳機能を解明しようとすることを目的とした流れで、脳の高性能・高機能をより模倣できる。
2つの流派を理解することは2つ理由から重要である。一つは情報を正しく理解するため。二つ目は、脳(神経科学)を学ぶことにより基礎(パーセプトロン)が出来、機能(例えばCNN)が構築され、技法(ディープラーニング)が加わり、現在に至ることができる。その脳の革新性を具現化することが半導体にとってニューロモルフィック工学そのものだからである。
流派の違いを理解しやすい代表的なポイントは、ディープラーニングでは積和演算を連続値として処理・伝播する。それに対してニューロモルフィックでは情報が離散的(0, 1)で伝播はスパイキングで行うことが多い。低消費電力性および脳の動作を模倣しやすい特性を持ち合わせている。前回の注釈3に記載した2つの点が当面の克服すべき課題である。
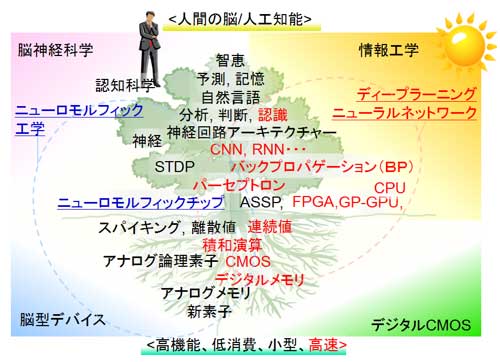
図4 2つの流派:人間の脳/人工脳を目指す二つの流れ
ニューロモルフィック工学は半導体工学の用語で、ディープラーニングは情報工学の用語
1.6 まだ2合目、3合目に到達した段階
図5は人工知能達成までの概念図である。到達までいくつもルートがあるようだが、図4の右側の情報工学系に近い(理解しやすい)ルートをイメージして作成してある。単体センシング( 1合目)を複数取り込み、相互関係をパターン化( 2合目)、さらに時系列でパターン化し、判断を加えPlan-Do-Seeを回すことにより自律/自動化が可能(3合目)になる。顕著な例としては車載カメラ(道路プロファイル)と車のハンドル角度のマルチモーダル化での自動ハンドル操作(NVIDIA)実証と、Alpha Go(CNNで19x19の碁盤上の黒白の石をパターン認識し、MCTS(Monte Carlo tree search:モンテカルロ木探索)で次の一手を決め、強化学習で自己鍛錬(注釈5))の勝利がある。現在は行動獲得(3合目)まで見通しがある状況と理解している。
3合目のレベルは、整備された環境(碁というルール)の下での自律化である。「学校では良い成績だがとか、高速道路では手放し運転ができるが」といった環境では良いが、いざ社会(会社、コース、一般道)に出ると使い物にならない。そのような場合の手段は2つある。一つは限界まで教師(教師パターン)を用意すること(4合目への道)である。危ないシーンを可能な限り、人間が用意し学習を繰り返すイメージである(実際はもっとスマートな方法があるかもしれない)。
もう一つは、自ら社会なり科学のルール(参考資料12)を生み出せることである。言語獲得も環境獲得はほぼ同じもので、「子供=小さい、転びやすい、・・・道路に飛び出してくる」と行った言語概念を人工知能が自動で作り出す(ルール作り)ことが基本なのだと理解できる。知能による極めて柔軟なルール作りにより、未知のデータ・状況に対して極めて有効に働く能力(究極の汎化能力)が生み出せるのではないかと想像する。第二の記念碑に向け、まだ見ぬ(おぼろげ)新規のアルゴリズム構築を想定しハード/ソフト/組織力を結集し動き出しつつある状況だといえるだろう。
そして今、半導体の出番が来た。その大筋の流れは見えてきた。回路アーキテクチャ技術、デバイス技術(ニューロモルフィック工学)による効率化・機能化・および技術革新が期待されている。
図5:人工知能実現までのステップ(参考資料 2、10、11)
まとめ
予想以上に半導体関連(特に韓国KAISTと米国Venture企業のMovidius社等)の動きが速い。GoogleのTPUもインパクトがある。次の1手は既に打たれていると予想され、その次の次の手を打つ必要があると思う。ソフト関連のフレームワークでは、後から参入した会社の方が勢いがあると聞いている。そういった後手有利の状況を鑑みると半導体にとり、今が旬なタイミング(基礎検討含め)と見ることができる。
第1章・・・ニューロチップを取り巻く概況〜いよいよ半導体の出番(1-1)
ニューロチップを取り巻く概況〜いよいよ半導体の出番(1-2)
第2章・・・ディープ・ニューラルネットワークのニューロチップへの実装〜その勘所は!!〜
第3章・・・回路アーキテクチャ、デバイス、そして将来動向(仮題)
注釈1〜3は、「ニューロチップ概説 〜いよいよ半導体の出番(1-1)」を参照
注釈4:ニューロモルフィックの大方のチップがそうだが、IBMのTrueNorthは積分発火型のニューロンモデルを採用している。イメージとして10〜100発(閾値で調整可能)ほど入力が来てポンプアップして閾値を超えると、スパイクが出る。通常のFloating-operations per second(FLOPS)等と異なり、スパイクの数を数えるsynaptic operations per seconds(SOPS)を速度指標に用いるしかない。そのことから比較は意味がないとも指摘されている。敢えて、x2にしてプロットしている。一回のイベント(発火)が最終出力(判定結果)に対してどのような寄与をもたらすかの半定性的な説明が欲しいところである。なお、閾値を上げて、よりまばらな動作とすると消費電力はリーク電流が大半となる場合があり、その場合には性能が極端に落ちて見えるので要注意である。チップへの画像入力のためにCMOSイメージセンサの代わりに特別なスパイク型のイメージセンサ(DVS/iniLabs)が使われている。
注釈5:碁というルールに従い、目的を与えられ、強化学習法というコンピュータの利点(多並列)を最大限に利用して鍛え上げる。AlphaGoの快挙に対する強化学習の父Richard S. Sutton氏の言葉、”AlphaGo is missing one key thing: the ability to learn how the world works - such as an understanding of the laws of physics, and the consequences of one’s actions”.(参考資料12)。
参考資料
1〜9までは、「ニューロチップ概説 〜いよいよ半導体の出番(1-1)」を参照
- 松尾豊, 「人工知能は人間を越えるか〜ディープラーニングの先にあるもの」, 角川選書, 2015年3月。
- 一杉裕志, 「脳全体の動作原理を解明へ 汎用人工知能への最短の道」, 日経エレクトロニクス, 99〜111頁, 2015年2月号.
- 米Business Insideの記事, “An AI expert says Google’s Go-playing program is missing 1 key feature of human intelligence”, 強化学習の父Richard S. Sutton氏(カナダ アルバータ大 教授)のコメント. 2016年3月12日.
- Mark Horowitz, “Computing’s Energy Problem (and what we can do about it), 2014 IEEE International Solid-State Circuits Conference, Session 1, Plenary 1.1, p10, 2014年2月