OminiVIsion、140dBのダイナミックレンジと暗闇撮影可能なカメラモジュール
車載カメラ市場が活発になっている。ON Semiconductorやソニーセミコンダクタソリューションズなどが車載向けに力を入れている中、OmniVisionはダイナミックレンジが140dBと広い最大250万画素(HD)のCMOSセンサと、近赤外感度を上げ暗闇でも撮影できるカメラモジュールを製品化した(図1)。
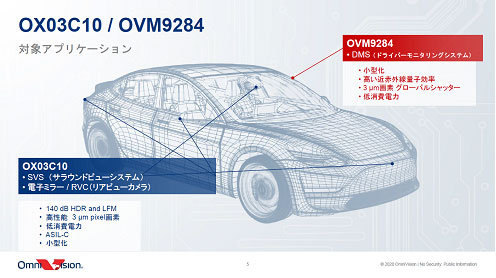
図1 車外向けOX03C10と車内向けOVM9284 CMOSカメラ 出典:OmniVision Technologies
「クルマ向けのCMOSイメージセンサ市場では世界2位に甘んじている」(OmniVision Technologiesの車載製品担当のシニアマーケティングマネジャーのKevin Chang氏)同社は、トップをとれないクルマ向けに力を入れている。CMOSイメージセンサと言っても車外向けと車内向けとでは仕様が全く違うため、2種類のセンサを開発した。車外向けでは、画素数だけではなく、ダイナミックレンジの広さが必要で、しかもLED信号機やクルマのLEDランプ表示、LEDサイネージなどを読みとれなくては困る。LEDのフリッカ対策ができていないCMOSセンサは、信号標識を正しく読みとれないことになる。
ダイナミックレンジの広さは、暗いトンネルや地下の駐車場などから外の明るい太陽の元での景色を見る場合、暗い所も明るい所も同様にくっきり見たい(図2)。しかし、明るい場所では絞りを小さく絞り、暗い場所では絞りを開く。そこで、ダイナミックレンジを上げるためには、明るい場所の景色と暗い場所の景色の画像(フレーム)をそれぞれ適正な絞りで撮影し、それらのフレームを重ねる、という作業を行う。この作業はもちろん短時間で処理するため、人間の目には暗い所も明るい所も途切れなく見える。
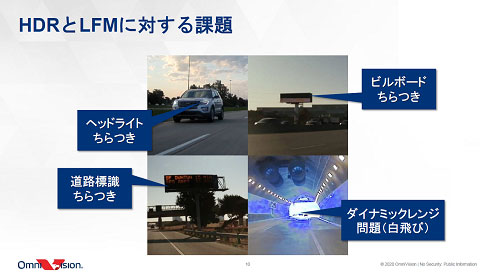
図2 広いダイナミックレンジ(HDR)と低いフリッカを両立 出典:OmniVision Technologies
暗い所と明るい所の差が大きすぎると、その中間の明るさの最適な絞りのフレームを撮影し重ねる。1年前に発表したビデオ信号処理プロセッサOAX4010では(参考資料1)、フラーム画像を3枚重ねて120dBのダイナミックレンジを得たが、今回の製品「OX03C10」(図3)は4枚の画像を合成することによって、140dBという値を得たとしている。このためにCMOSイメージセンサチップに画像処理プロセッサチップISPを3次元に重ね合わせた。このためホストCPUへは4レーンのMIPI CSI-2あるいは12ビットのDVPインターフェースを通して画像データをそのまま転送できる。
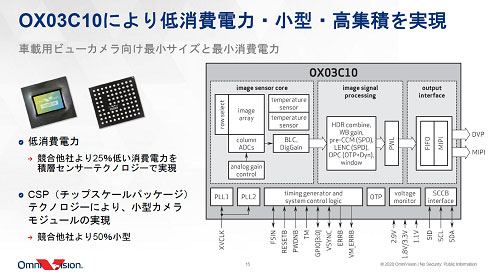
図3 新製品OX03C10のIC構成 出典:OmniVision Technologies
また、フリッカ抑制は今回、ISP側でアルゴリズムとして備えている。フリッカ(チラつき)は、もともとLEDランプのドライバICによる。LED照明では、LEDチップを100個近く多数並列、直列に接続しているが、6~8個程度直列に接続したストリング列を並列に10列程度接続している。ストリング列のLEDを順次点滅させていくことで消費電力とコストの削減を図っている。このため、電子回路は順番に短期間に点滅させているのだが、人間の目には全てのLEDチップが光っているように見える。人間は光の残像を見ているからだ。
ストリング列ごとに順番に点滅しているLEDランプは、イメージセンサの電子回路が30枚/秒あるいは60枚/秒のフレームの中に、点灯していないLEDのストリング列が来た時間は点灯していないと捉えてしまう。1年前のISPでは、そのLEDドライバのタイミングを取り込まないように、ISP側のタイミングを工夫していた。今回は1フレームで4枚の画像を撮ったが、それぞれの画像ごとにフリッカを検出し、フレーム内のフリッカマッピングを作成し、画像を合成する際にフリッカを補正するアルゴリズムを適用した(図4)。
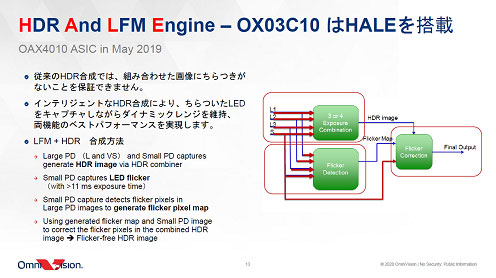
図4 HDRの画像を重ね合わせる時にフリッカを補正するアルゴリズムを使う 出典:OmniVision Technologies
新製品はこれだけではない。車内向けのCMOSカメラモジュールもリリースした。この「OVM9284」カメラモジュールは、運転者の顔に940nmの近赤外線を照射し、目が閉じようとしているかどうかを検出したり、よそ見運転をしているかどうかを検出したりする。
ここでは、画面全体を一度に読み出すグローバルシャッタ方式を用いた。一般には静止しているものを写す場合には1行ずつ走査していくローリングシャッタの方が低コストのためよく使われていた。運転者の顔はあまり動かないためローリングシャッタでも差し支えないのだが、近赤外の画像を撮るためには赤外線を顔に照射する必要があり、ローリングシャッタだと長時間照射しなければならない。すると消費電力が大きくなってしまう。このため1回の照射で1フレームをとるグローバルシャッタを用いた。

図5 消費電力が低く、小型の近赤外カメラモジュール 出典:OmniVision Technologies
車内向けだと、運転者はカメラをずっと向けられていることを嫌がる傾向があるため、カメラモジュールはできるだけ小さくしたい。ただし、小さくすると発熱しやすくなるため、消費電力の小さい方式を選ぶことになる。このカメラモジュールの大きさは6.5mm×6.5mm×6.2mm(高さ)と小さく、しかも消費電力は競合品より50%低いとしている(図5)。レンズ、信号処理回路内蔵のCMOSセンサ、MIPI/DVPの出力インターフェースチップをウェーハレベルでスタックしてパッケージングした。このままリフローハンダも可能だという。
参考資料
1. OmniVision、フリッカ抑制と広いダイナミックレンジを両立させたISP (2019/05/16)