Xilinx、自動運転向けたSoCのロードマップを明らかに
Xilinxが自動車エレクトロニクスにじわじわと乗り出している。2014年はまだ14社の29モデルにしか入り込めなかったが、2017年には26社96モデルに広げ、2018年は29社111モデルに食い込めると見込んでいる。FPGAといったハードウエア専用回路を作るデバイスの最大の特長はコンピューティング能力であり、自動運転の物体認識に威力を発揮する。3月に発表した新アーキテクチャACAPの詳細をこのほど明らかにした。
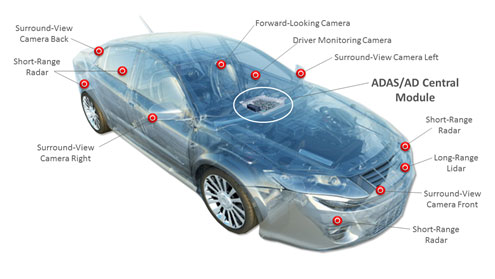
図1 クルマに搭載する視覚センサは多くなる 出典:Xilinx
Xilinxが狙うADASでは、フロントカメラモジュールからの映像から前方の物体を乗用車、トラック、自転車、人などを見分けるための演算にFPGAやSoCを使う。そのセンサはカメラだけではなく、レーダーやLiDARなどもある。しかも、その数は多い(図1)。サラウンドカメラには前後左右に最低4台、それとは別に前方を見るための専用カメラ、周囲四隅から周囲にある物体を検出するための近距離レーダー4個、そして前方100m先まで見られるLiDARもいる。このため、それらのセンサデータを束ねてデータを処理するセンサフュージョンが欠かせなくなる。ここにもFPGAなどのロジックが必要になる。
サラウンドビューは4台のカメラ映像を合成してグラフィックスで表現するシステム。絵画像をつなぐための演算にもFPGAは使える。短距離レーダーは24GHz程度の準ミリ波を使い、その反射波から物体の有無を検出する。クルマの前後の四隅には、ドライバーから死角になるためこのセンサが必要。ただし、超音波センサを使う手もある。またLiDARはレーザー光を使ってその反射から物体検出と距離を測るセンサである。ポリゴンミラーを使って車の周囲をグルグル見渡すよりも、前方の視野を100メートルまで伸ばし、多数のセンサを使う方が安全性が高まる。
多くのセンサからの信号データを意味のある情報に変換するための処理にFPGAをはじめとするロジックやプロセッサを使う。FPGA側から見て、集積度が高くなりシステム化が強くなればなるほど、全てを専用のハードワイヤード回路で構成することはコスト的に見合わなくなる。そこで、ソフトウエアでフレキシブルに対応すべき機能と、ハードウエアで高速処理すべき機能を折り込む必要が出てくる。このため、高集積FPGAはSoCに近づいていく。
Xilinxの高集積FPGAはSoCとなり、SoCの中に変更可能なロジック(FPGA)のほかに、ソフトウエアで変更可能なCPU、さらにメモリなども集積しているが、ある程度決まった機能なら専用回路として集積しておく手もある。
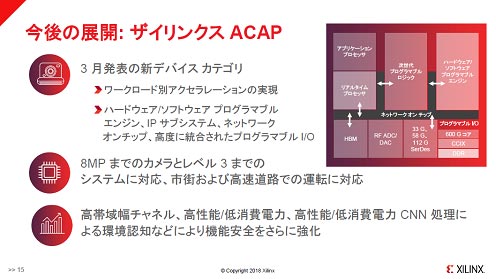
図2 3月に提案した新アーキテクチャのSoC 出典:Xilinx
そこでXilinxは、複数の専用回路(IPサブシステムコア)をダイナミックに切り替えられるDFX(Dynamic Function eXchange)という機能を設ける。これは、例えば自動運転の状況によって、高速道路走行中と、駐車場での自動走行の違いをダイナミックに切り替えることができるという機能だ。時間的な多重化ハードウエア回路をこのSoC以外に集積するよりはシステムを小型にできる。
また、OTA(Over the Air)ではソフトウエアのアップデートだけではなくハードウエアの機能のアップデートも可能にする。さらには新機能の追加やAIアルゴリズムなどの更新、さらにはミッションクリティカルな機能(例えばセキュリティアルゴリズムの更新)にも対応できるようにするとしている。